

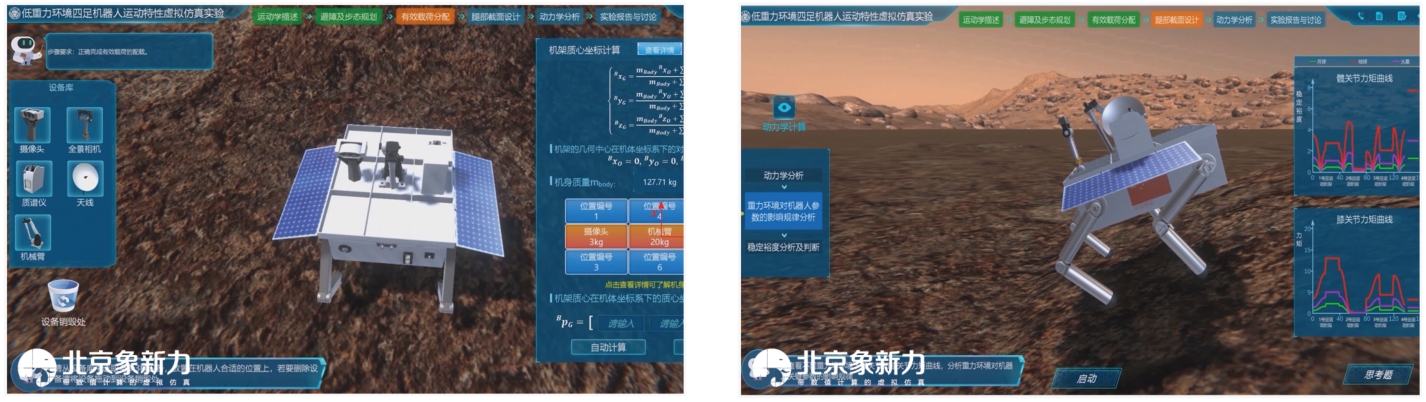
低重力环境四足机器人运动特性虚拟仿真软件
在当今科技飞速发展的时代,机器人技术成为了科研与教育领域的热门话题。尤其是在探索地外星球等极端环境时,四足机器人因其独特的运动优势受到了广泛关注。为了深入研究四足机器人在低重力环境下的运动特性,低重力环境四足机器人运动特性虚拟仿真软件应运而生。这款软件不仅为科研人员提供了强大的研究工具,也为高校相关专业的教学提供了有力支撑。
低重力环境四足机器人运动特性虚拟仿真软件拥有众多知名的应用客户,如重庆大学、太原理工大学、大连科技学院等。这些高校借助该软件开展教学与科研工作,取得了良好的效果。
本虚拟仿真实验以四足机器人的总体力学设计为目标,从《理论力学》课程的基本概念和方法出发,深入研究四足机器人在地外星球表面行走时的重要力学特性。学生通过模拟低重力环境的四足机器人实验,能够改变系统的几何参数、材料参数、机身负载、机器人行走环境、典型路况等,从而作出合理运动规划。通过本虚拟系统仿真,检验运动规划是否能使机器人实现预期运动。在此基础上,还能通过虚拟仿真,检验参数选择和运动规划的可行性。这一过程充分体现了低重力环境四足机器人运动实验的科学性与严谨性。
该软件具有显著的产品特色。首先,“虚实结合” 手段更加符合学生认知过程。实验构建了覆盖认知实习、实验全过程的 “虚实结合” 实验流程。将理论授课、线下实体实验与线上虚拟实验融为一体,通过实验将理论知识与工程实践有机结合,有助于培养学生综合应用所学知识解决复杂工程问题的能力。其次,设计空间 “自由”。学生可以在合理范围内自由设定或选定参数,其响应结果依靠实时计算给出并以动画形式呈现。计算的正确性与有效性得到第三方计算软件的详细验证,为学生 “自由发挥” 提供足够的空间,这也为低重力四足机器人虚仿技术应用提供了广阔的平台。最后,注重过程培养,强化思考深度。评价系统在有效考查学生完成实验基本步骤的前提下,特别重视学生的思维能力与再学习能力的培养,在主观问题中加入开放性题目让学生能拓展思考并提出解决办法。
软件的实验内容丰富多样,涵盖了机器人运动学描述、四足机器人避障及步态分析、机器人有效载荷分配、机器人构件结构分析、机器人动力学分析、多个物体系统的运动表征及应用、复杂空间力系的简化及其在运动稳定性中的应用、复杂机械系统的动力学表征方法及应用、理论力学分析方法在杆件强度分析中的应用等。这些实验内容有助于学生全面了解四足机器人运动特性研究与分析的各个方面。
该软件还能为多门课程提供有力支撑,包括理论力学、材料力学、结构力学、工程力学、机器人技术、控制工程等。在这些支撑课程的教学中,软件能够辅助教师进行教学,让学生更加直观地理解课程内容。